
by University of Southern California
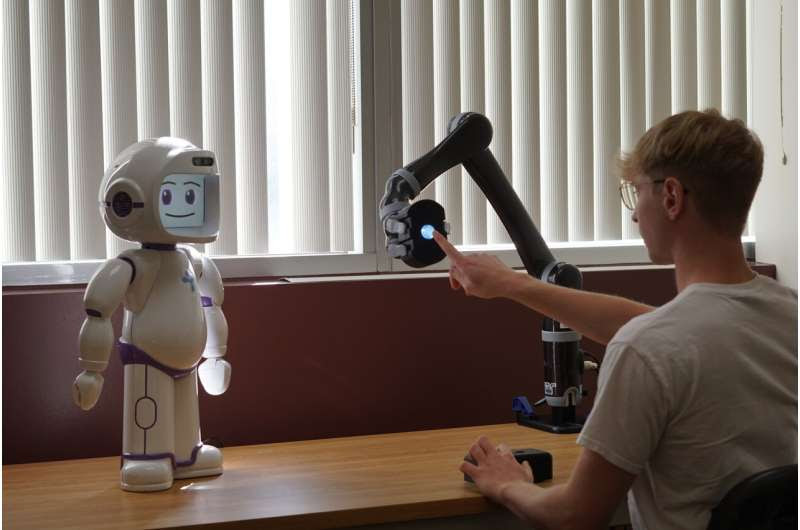
Lead author Nathaniel Dennler, a computer science doctoral student, with the robotic arm, which provides precise 3D spatial information, and a socially assistive robot, which gives instruction and motivation throughout the assessment. Credit: Nathan Dennler
Stroke is a leading cause of long-term disability worldwide. Each year more than 15 million people worldwide have strokes, and three-quarters of stroke survivors will experience impairment, weakness and paralysis in their arms and hands.
Many stroke survivors rely on their stronger arm to complete daily tasks, from carrying groceries to combing their hair, even when the weaker arm has the potential to improve. Breaking this habit, known as “arm nonuse” or “learned nonuse,” can improve strength and prevent injury.
But, determining how much a patient is using their weaker arm outside of the clinic is challenging. In a classic case of observer’s paradox, the measurement has to be covert for the patient to behave spontaneously.
Now, USC researchers have developed a novel robotic system for collecting precise data on how people recovering from stroke use their arms spontaneously. The first-of-its-kind method is outlined in paper published in Science Robotics.
Using a robotic arm to track 3D spatial information, and machine learning techniques to process the data, the method generates an “arm nonuse” metric, which could help clinicians accurately assess a patient’s rehabilitation progress. A socially assistive robot (SAR) provides instructions and encouragement throughout the challenge.
“Ultimately, we are trying to assess how much someone’s performance in physical therapy transfers into real life,” said Nathan Dennler, the paper’s lead author and a computer science doctoral student.
The research involved combined efforts from researchers in USC’s Thomas Lord Department of Computer Science and the Division of Biokinesiology and Physical Therapy.
“This work brings together quantitative user-performance data collected using a robot arm, while also motivating the user to provide a representative performance thanks to a socially assistive robot,” said Maja Matarić, study co-author and Chan Soon-Shiong Chair and Distinguished Professor of Computer Science, Neuroscience, and Pediatrics. “This novel combination can serve as a more accurate and more motivating process for stroke patient assessment.”
Additional authors are Stefanos Nikolaidis, an assistant professor of computer science; Amelia Cain, an assistant professor of clinical physical therapy; Carolee J. Winstein, a professor emeritus and an adjunct professor in the Neuroscience Graduate Program; and computer science students Erica De Guzmann and Claudia Chiu.
Mirroring everyday use
For the study, the research team recruited 14 participants who were right-hand dominant before the stroke. The participant placed their hands on the device’s home position—a 3D-printed box with touch sensors.
A socially assistive robot (SAR) described the system’s mechanics and provided positive feedback, while the robot arm moved a button to different target locations in front of the participant (100 locations in total). The “reaching trial” begins when the button lights up, and the SAR cues the participant to move.
In the first phase, the participants were directed to reach for the button using whichever hand came naturally, mirroring everyday use. In the second phase, they were instructed to use the stroke-affected arm only, mirroring performance in physiotherapy or other clinical settings.
Using machine learning, the team analyzed three measurements to determine a metric for arm nonuse: arm use probability, time to reach, and successful reach. A noticeable difference in performance between the phases would suggest nonuse of the affected arm.
“The participants have a time limit to reach the button, so even though they know they’re being tested, they still have to react quickly,” said Dennler. “This way, we’re measuring gut reaction to the light turning on—which hand will you use on the spot?”
Safe and easy to use
In chronic stroke survivors, the researchers observed high variability in hand choice and in the time to reach targets in the workspace. The method was reliable across repeated sessions, and participants rated it as simple to use, with above-average user experience scores. All participants found the interaction to be safe and easy to use.
Crucially, the researchers found differences in arm use between participants, which could be used by health care professionals to more accurately track a patient’s stroke recovery.
“For example, one participant whose right side was more affected by their stroke exhibited lower use of their right arm specifically in areas higher on their right side, but maintained a high probability of using their right arm for lower areas on the same side,” said Dennler.
“Another participant exhibited more symmetric use but also compensated with their less-affected side slightly more often for higher-up points that were close to the midline.”
Participants felt that the system could be improved through personalization, which the team hopes to explore in future studies, in addition to incorporating other behavioral data such as facial expressions and different types of tasks.
As a physiotherapist, Cain said the technology addresses many issues encountered with traditional methods of assessment, which “require the patient not to know they’re being tested, and are based on the tester’s observation which can leave more room for error.”
“This type of technology could provide rich, objective information about a stroke survivor’s arm use to their rehabilitation therapist,” said Cain. “The therapist could then integrate this information into their clinical decision-making process and better tailor their interventions to address the patient’s areas of weakness and build upon areas of strength.”
More information: Nathaniel Dennler et al, A metric for characterizing the arm nonuse workspace in poststroke individuals using a robot arm, Science Robotics (2023). DOI: 10.1126/scirobotics.adf7723
Provided by University of Southern California
Leave a Reply